プチコン3号 SmileBASIC コミュニティ返信[15]親投稿InDoor TheInDoor122015/7/5 11:143平方の定理でゴリ押す方法もありまっせ。 移動元の座標を(X0,Y0)、 移動先の座標を(X1,Y1)とおくと、 1移動したときの移動量は x軸方向に(X1-X0)/SQR(POW(X1-X0,2)+POW(Y1-Y0,2)) y軸方向に(Y1-Y0)/SQR(POW(X1-X0,2)+POW(Y1-Y0,2)) …うん、三角関数使った方がずっと楽だなあ2そうだね プレイ済み2017/11/03 19:59:32に取得
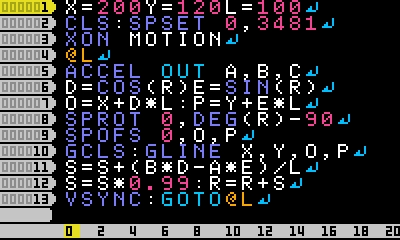
プチコン3号 SmileBASIC コミュニティ投稿InDoor TheInDoor122015/07/03 23:15:37ふむふむ、QSPが流行っているのか。 …ということで、「ハカセつき振り子」を作ってみました。 加速度センサーでハカセを回して遊びましょ。5そうだね 4返信プレイ済み2017/11/03 20:02:22に取得
プチコン3号 SmileBASIC コミュニティ返信[29]親投稿InDoor TheInDoor122015/6/30 22:34クレクレの定義は人によって違いますが、 「公開キーがほしい」 という内容のものであればほとんど「クレクレはやめろ」などの批判のコメントが飛んできます。 ということで、それをクレクレの定義として話を進めると、 「マナーが悪いものだから、クレクレはよくないものだ」 という理屈は間違っているように思います。 マナーが悪い傾向はあるかもしれませんが、すべてのクレクレのマナーが悪いわけではありません。 クレクレとマナーは別問題なんです。1そうだね プレイ済み2017/11/03 20:06:45に取得
プチコン3号 SmileBASIC コミュニティ返信[5]親投稿InDoor TheInDoor122015/6/29 21:13クレクレが嫌われるのは、「ずるい」と思う感情だと思います。 「俺はちゃんと自分の力で探しているのに、奴らは人に聞いて楽しやがって!ずるいぞ!」 こんなところです。 もっとも、これでは他人を批判するのを正当化できないので、無意識のうちに「クレクレは迷惑なことだ」などの正当化できる理由(ただし根拠なし)に入れ替えてしまう場合がほとんどですが。 僕にとっては、いちいちクレクレを批判してまわっているコメントの方が迷惑です。 批判するのであれば、ちゃんとした理屈を用意してほしい。4そうだね プレイ済み2017/11/03 20:06:47に取得
プチコン3号 SmileBASIC コミュニティ返信[1]親投稿InDoor TheInDoor122015/6/28 18:51>うえこう さん 実はまだ色付けの実装ができていなかったり。 CADもどきとして公開するなら実装しないとなあ… でも処理速度が気になって手をつけられなーい(←「めんどくさい」をかっこつけて言うとこうなる。逆にダサいかも)0そうだね プレイ済み2017/11/03 20:07:57に取得
プチコン3号 SmileBASIC コミュニティ返信[4]親投稿InDoor TheInDoor122015/6/28 18:45PockyScriptに期待です。0そうだね プレイ済み2017/11/03 20:07:54に取得
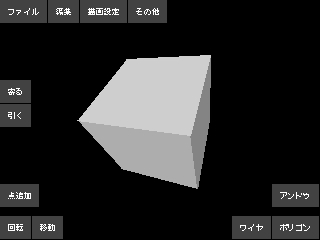
プチコン3号 SmileBASIC コミュニティ投稿InDoor TheInDoor122015/06/28 18:06:37やっとポリゴン表示が完成したので、CADもどきのUIにとりかかってます。 それにしても、漢字って素晴らしい! ツールで使うとそれっぽさが倍増で、自己満足にひたれるー16そうだね 3返信プレイ済み2017/11/03 20:07:57に取得
プチコン3号 SmileBASIC コミュニティ返信[3]親投稿InDoor TheInDoor122015/6/25 21:16いや、先手必勝です このタイプのゲームは、1ターンに増やせる最大の数字をA、到達したら負けの数字をBとすると、 (B-1)MOD(A+1) を計算することでどちらが勝つかわかります 0なら後手必勝、それ以外なら先手必勝0そうだね プレイ済み2017/11/03 20:14:08に取得
プチコン3号 SmileBASIC コミュニティ返信[13]親投稿InDoor TheInDoor122015/6/25 20:56…やったぞ! 例のバグ、原因がわかったー! えーと、かなりしょーもないところで引っ掛かってました。 裏表の判定は、上の説明の方法で問題ないっす。0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[12]親投稿InDoor TheInDoor122015/6/24 21:42[続き] 次に、カメラの位置と頂点の座標から視線ベクトルを求め、それと上の外積との内積を公式にかけて求める。 ※2つのベクトルがあるとき、(Aの長さ)*(Bの長さ)*cos(180°以内でAとBのなす角)をA,Bの内積という。 内積の正負によって、裏表を判定する。 …なんかとっても難しそうな説明になってしまいましたが、ベクトルの概念さえわかっていればたぶん理解できると思います。 内積と外積を求める公式や、これで裏表が判定できる理由は、もし知りたいのであれば説明します。0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[11]親投稿InDoor TheInDoor122015/6/24 21:41>うえこう さん 例のバグが残っているので「これが正しい」と断言はできませんが、一応それっぽく動くので自分のやり方を書いてみます。 カメラから見て頂点が時計回りなら表、反時計周りなら裏とすることを考える。 まず、ポリゴンを2つのベクトルに分割して、 例:ポリゴン(頂点A,B,C)↓ ベクトルP(Bx-Ax,By-Ay,Bz-Az), ベクトルQ(Cx-Ax,Cy-Ay,Cz-Az) 外積P×Qを公式にかけて求める。 ※2つのベクトルA,Bがあるとき、それらを2辺とする平行四辺形に垂直で、180°以内の回転角で右ねじをAからBに回した時に進む向きをもち、大きさがこの平行四辺形の面積と等しいベクトルのことをA,Bの外積といい、A×Bと書く。 [続く]0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[10]親投稿InDoor TheInDoor122015/6/24 21:40>かたけ~ さん けい さんの仰るとおり、「見せる必要が無い場合があるから」描画しない、というのが正確なところだと思います。0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[7]親投稿InDoor TheInDoor122015/6/23 21:02>>カービィ★KIRBY さん そんなかんじです。うう、絵心がほしい >>うえこう さん >奥にある順番 完璧な方法がないので、いろいろ方法があります。 僕はポリゴンの頂点のZ座標を足し合わせた値でソートしていますが、これだけだとポリゴン欠けがひどいです。 だからといって複雑な方法を使うとプチコンの速度が持たないし… >隠れているのってどういう仕組みですか? なぜ裏のときは隠れていると断言できるのか、という質問でしょうか?それとも、どういう計算で裏か表かを調べているのかという質問でしょうか?0そうだね プレイ済み2017/11/03 20:16:13に取得
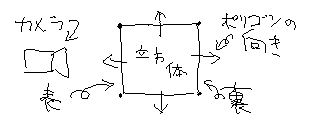
プチコン3号 SmileBASIC コミュニティ返信[5]親投稿InDoor TheInDoor122015/6/23 20:18このカメラから見ると、奥にあるポリゴンは裏向きです(反対側から見ると表になる)。 んで、立方体などの場合、裏向きのポリゴンは他のポリゴンに完全に隠れてしまいます。 ということで描画する必要なし、ということです。 …うーん、あやしい説明。 わからない場合、容赦なく指摘してくださいな。0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[3]親投稿InDoor TheInDoor122015/6/23 20:07えーとえーと 裏表判定は、背面カリングという処理で使う計算です。 背面カリングというのは、カメラから見たポリゴンの向きを判定して裏向きのとき描画をやめるという処理で、 処理速度を上げたりポリゴン欠けを防いだりします。 そんでもってポリゴンの裏表が何なのかというと… うー、言葉で説明できんので図で説明します0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[2]親投稿InDoor TheInDoor122015/6/23 19:41>うえこうさん えーと、 裏表判定でプチコンの演算誤差とは思えない範囲の誤差が出ます。 …説明になってるかなあ0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[1]親投稿InDoor TheInDoor122015/6/23 19:36いやあ、どの辞書とは言わないけどね… 右手系での計算なら、そう書いておいてくれないと左手系信者の僕が困るじゃないか。 外積なんて嫌いだあ(←世話になっている分際で何を言う)0そうだね プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ投稿InDoor TheInDoor122015/06/23 19:31:40ヒャッハーー!(←狂い気味) ついに、ポリゴンの裏表判定の計算で出る値が逆になる理由を突き止めたー! これで残る問題は、あと一つに。5そうだね 19返信プレイ済み2017/11/03 20:16:13に取得
プチコン3号 SmileBASIC コミュニティ返信[2]親投稿InDoor TheInDoor122015/6/15 19:12スプライトでポリゴンっぽいことはきついですが、 遠くのものを小さく、近くのものを大きく表示することで3Dっぽくなります。(擬似3D) 三角関数を使う必要もなく、お手軽。0そうだね プレイ済み2017/11/03 20:29:25に取得